
文章图片

文章图片

文章图片
【机器人感知大升级,轻量化注入几何先验,成功率提升31%】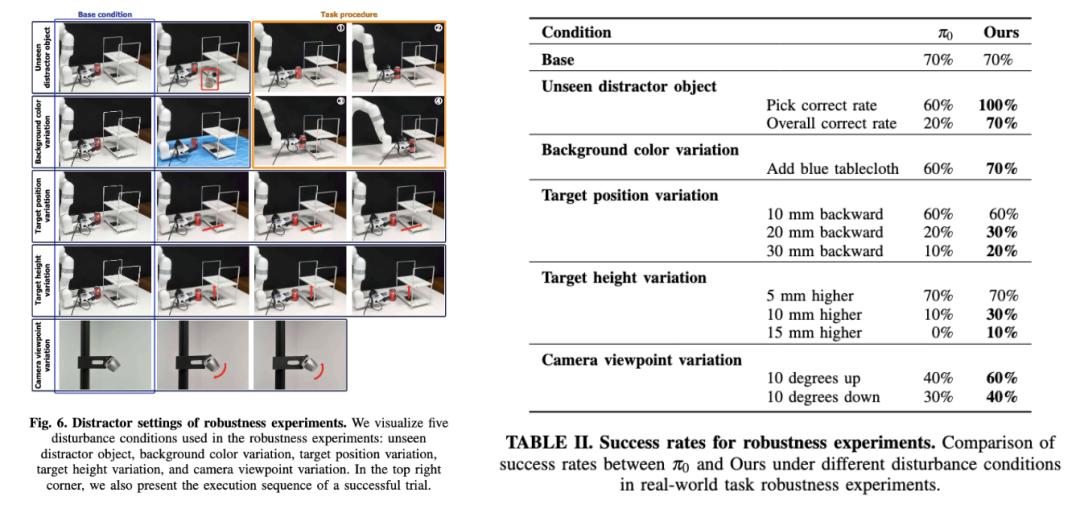
在机器人学习领域 , 如何让AI真正“看懂”三维世界一直是个难题 。
VLA模型通常建立在预训练视觉语言模型(VLM)之上 , 仅基于2D图像-文本数据训练 , 缺乏真实世界操作所需的3D空间理解能力 。
当前基于显式深度输入的增强方案虽有效 , 但依赖额外传感器或深度估计网络 , 存在部署难度、精度噪声等问题 。
为此 , 上海交通大学和剑桥大学提出一种增强视觉语言动作(VLA)模型空间理解能力的轻量化方法Evo-0 , 通过隐式注入3D几何先验 , 无需显式深度输入或额外传感器 。
该方法利用视觉几何基础模型VGGT , 从多视角RGB图像中提取3D结构信息 , 并融合到原有视觉语言模型中 , 实现空间感知能力的显著提升 。
在rlbench仿真实验中 , Evo-0在5个需要精细操作的任务上 , 平均成功率超过基线pi0 15% , 超过openvla-oft 31% 。
Evo-0:实现2D–3D表征的融合Evo-0提出将VGGT作为空间编码器 , 引入VGGT训练过程中针对3D结构任务提取的t3^D token 。 这些token包含深度上下文、跨视图空间对应关系等几何信息 。
模型引入一个cross-attention融合模块 , 将ViT提取的2D视觉token作为query , VGGT输出的3D token作为key/value , 实现2D–3D表征的融合 , 从而提升对空间结构、物体布局的理解能力 。
融合后的token与语言指令共同输入冻结主干的VLM , 预测动作由flow-matching策略生成 。 训练中 , 仅微调融合模块、LoRA适配层与动作专家 , 降低计算成本 。
研究团队通过在5个rlbench模拟任务、5个真实世界操作任务上的全面实验 , 以及在5种不同干扰条件下的鲁棒性评估 , 证明了空间信息融合方法的有效性 。 在所有设置中 , Evo-0都一致地增强了空间理解 , 并且优于最先进的VLA模型 。
除了上述展示的效果外 , 在超参数实验中 , 为了分析超参数如何影响模型性能 , 团队在5个RLBench任务上进行了额外的实验 。 他们重点关注两个方面:训练步数和执行步数 , 并评估它们对任务成功率的影响 。
值得注意的是 , 仅用15k步训练的Evo-0已经超过了用20k步训练的π0 , 这表明Evo-0具有更高的训练效率 。
在真机实验部分 , 实验设计五个空间感知要求高的真实机器人任务 , 包括目标居中放置、插孔、密集抓取、置物架放置及透明物体操作等 。 所有任务均对空间精度容忍度极低 。
Evo-0在全部任务中均超越基线模型pi0 , 平均成功率提升28.88% 。 尤其在插孔与透明物抓取任务中 , 表现出对复杂空间关系的理解与精准操控能力 。
在鲁棒性实验中 , 论文设计了5类干扰条件:(1)引入一个未见过的干扰物体 , (2)背景颜色的变化 , (3)目标位置的位移 , (4)目标高度的变化 , (5)相机角度的变化 。 Evo-0均有相对鲁棒的结果 , 并且强于基准pi0 。
综上所述 , Evo-0的关键在于通过VGGT提取丰富的空间语义 , 绕过深度估计误差与传感器需求 , 以插件形式增强VLA模型的空间建模能力 , 训练高效、部署灵活 , 为通用机器人策略提供新的可行路径 。
论文链接:https://arxiv.org/abs/2507.00416
本文来自微信公众号“量子位” , 作者:Evo-0团队 , 36氪经授权发布 。
推荐阅读














- 开源鸿蒙“书同文”,星闪“车同轨”,美的家电大一统的启示
- 荣耀放大招!罗巍亲曝AiMAGE“绝密项目”即将登场:从未见过,甚至不敢想
- 定档10月17日发布!红魔11 Pro系列或搭载8000mAh超大电池
- “一根线连所有”成真,GPMI让电视大屏加速进化到下个世代
- 半导体光刻机风起云涌:大厂加单,俄罗斯发力
- 晶圆代工大厂披露与增芯科技合作情况
- 估值840亿AI实验室再放大招,他们要给大模型戴上「紧箍咒」
- 越来越挤的云栖大会,越来越 AI 的阿里巴巴
- 小米17 Pro Max评测:五年高端之路的集大成者
- iPhone 18 Fold 提前曝光,迎来 5 大新升级