文章图片

文章图片
文章图片

文章图片
【估值840亿AI实验室再放大招,他们要给大模型戴上「紧箍咒」】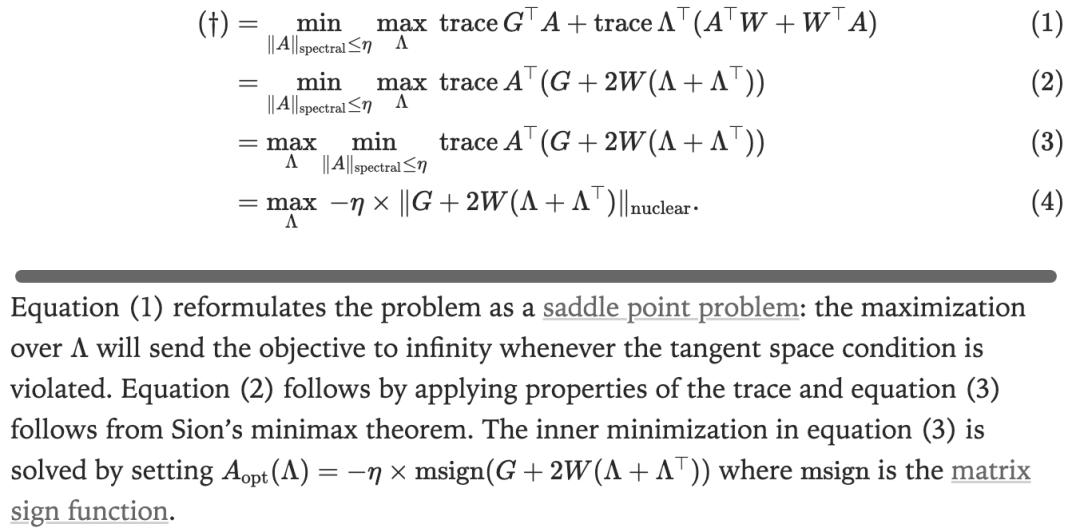
文章图片
刚刚 , OpenAI前CTO Mira Murati创办的Thinking Machines Lab再次发布成果!
这是他们继《克服LLM推理中的不确定性》(Defeating Nondeterminism in LLM Inference)之后 , 第二篇研究文章——《模块流形》(Modular Manifolds) 。
博客地址:https://thinkingmachines.ai/blog/modular-manifolds/
训练大型神经网络如同「走钢丝」 , 必须小心翼翼地维持其内部「健康」 , 防止权重、激活值或梯度这些关键张量变得过大或过小 , 以免引发数值溢出等一系列问题 。
其中一个重要的思路 , 是为大模型提供一套统一的量级管理 。
首先是稳住基本盘 。
使用Layer Norm技术把每层的输出拉回合适范围 , 对激活向量进行归一化(normalization) , 这也是目前一种普遍的做法 。
对梯度更新进行归一化也很常见 , 例如Muon优化器对更新进行谱归一化处理 , 使每一步更新的幅度可控 。
再进一步 , 是直接「管住」权重本体 。
归一化权重矩阵是一个值得尝试的方向 。
文中提出了一种重新思考优化算法提供了新视角:将权重张量约束在某个子流形(submanifold)上 , 以便与这些流形约束协同设计优化算法 。
这好比把「救火」变「预防」:
一开始就把参数放在健康区间 , 让训练更稳、更具解释性 , 从而使大模型可以更稳定、高效地训练起来 。
流形优化器的形态我们知道 , 流形只是一个局部看起来很平坦的曲面 。
如果放大到足够多 , 它看起来就像是一个普通平面 。
流形上某一点附近的局部平坦空间称为「切空间」(tangent space) 。
如图1所示 , 三维球面或更高维度的超球面是一个流形 , 图中以红色部分表示其在某点的切平面 。
为了让权重能够「待在」指定的流形里 , 一个简单的方法是使用普通优化器 , 在每步更新后将权重投影回流形 。
但问题是如果优化步骤偏离流形太多 , 再被强制投影回来 , 这会导致名义学习率不再对应参数在流形上的实际位移 , 从而削弱我们对「步长—效果」关系的直觉 。
想在流形上认真设计训练算法 , 必须先想清楚:在切空间里怎么度量「距离」?
一个解决思路是直接在切空间中进行优化 。 这样 , 每一步都是沿着流形「表面」走 , 学习率能更好地对应「实际位移」 。
常见的选择是欧几里得距离 , 但也可以选择以其他方式测量距离 , 如图2所示 。
值得注意的是 , 距离度量方式的选择会直接影响最优优化步骤的方向 。
图3中 , 粉色箭头表示原始梯度——即损失函数对权重的偏导数(partial derivative) 。
也就是说 , 我们不一定非要严格按照梯度方向移动 。
为了用数学表达这个过程 , 我们可以把「在流形约束和特定距离度量下的最优更新方向」看作一个带约束的优化问题 , 可以用一个搭配欧几里得范数的超球面来举例 。
用g表示梯度 ,w表示超球面上的当前点 ,a表示更新方向 ,η表示学习率 , 我们需要解决的问题是:
再回到图 1、2 和3所展示的可视化语言 , 这个公式的意思是:绿色箭头(也就是a的最优解)必须同时满足两个条件:
一是它要落在红色的切平面上 , 二是它必须在半径为η的黄色圆圈上 。
我们可以应用拉格朗日乘数法来求解 。
其中λ和μ是拉格朗日乘子 。
对这个拉格朗日函数对a求导并令其为零 , 然后结合两个约束条件求解λ和μ , 就可以得到最优更新方向 。
简单来说最优更新的做法是:先从梯度中减去与w同方向的径向分量 , 即把梯度投影到切空间上 , 然后将结果归一化 , 再乘以学习率 。
这样得到的更新方向就在切空间里了 。
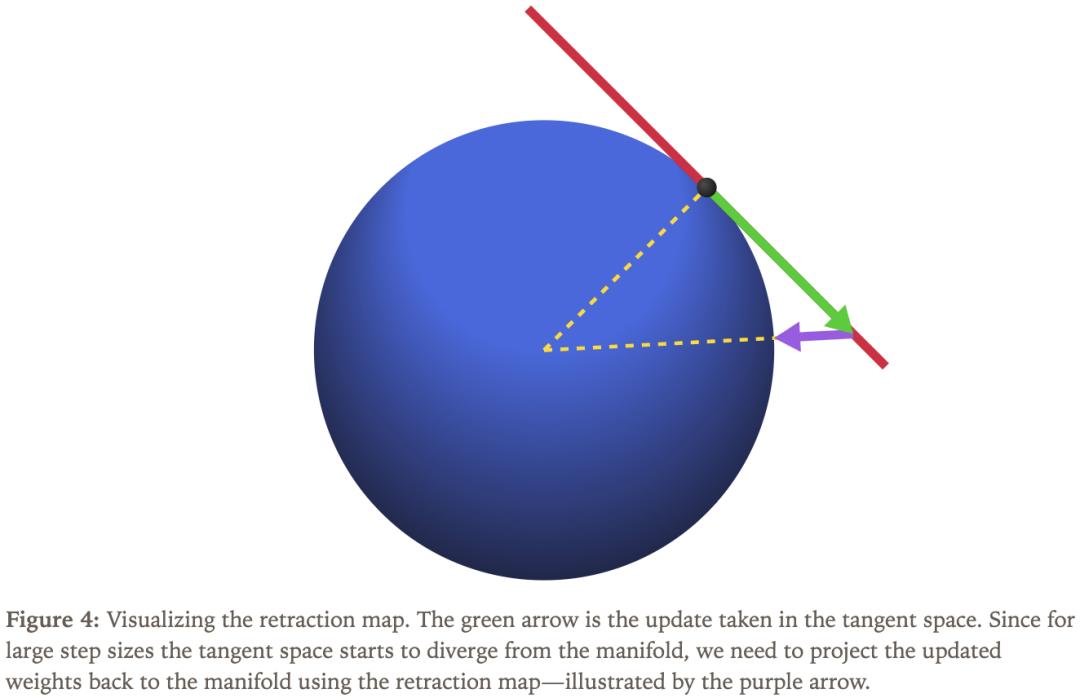
图4中显示这个微小的修正过程被称为「回缩映射」(retraction map) 。
完整的流形优化算法如下:
总结来说 , 一阶流形优化器包含三个步骤:
找到一个单位长度的切向量 , 在梯度方向上尽可能远;
用学习率乘以这个方向 , 然后从当前权重中减去;
把更新后的权重通过回缩映射拉回流形上 。
在执行这一流程时 , 我们需要决定选择什么样的流形来作为约束 , 此外是如何定义「长度」的度量方式 。
根据这两个选择的不同 , 我们就能得到不同的优化算法 , 具体见下表 。
流形MuonTransformer中的典型权重矩阵W是一个「向量变换器」 , 即它将输入向量x转换为输出向量y=Wx 。
我们希望设计一种流形约束和距离函数 , 使得该矩阵对输入向量的作用合理:既不应导致输出值过大或过小 , 也不应在更新权重时引起输出向量剧烈变化或几乎无变化 。
一个思考矩阵如何作用于向量的好方法是使用奇异值分解(SVD) , 如图 5 所示 。
SVD以分解矩阵的方式显示矩阵如何沿着不同的轴拉伸输入向量 。
我们希望矩阵的「拉伸效应」接近于1 , 因此选择了一个所有奇异值均为1的矩阵流形 。
这种矩阵流形在数学上被称为Stiefel流形 , 在高矩阵( m≥n)的假设下 , 它可以等价地定义为以下集合:
要为Stiefel流形设计优化器 , 还需选择一个合适的距离函数 。
为限制权重更新对输入向量的最大拉伸作用 , 谱范数(spectral norm) , 即矩阵最大奇异值的度量是一个合适的选项 。
虽然它只约束了最大效应 , 但由于优化器会饱和这一上限 , 因此也能间接防止最小效应过小 。
正是这一想法 , 促成了Muon优化器的提出 。
这一想法与Stiefel流形约束结合后 , 就形成了「manifold Muon」问题 。
文中的一个关键发现是一个凸优化问题 , 可以通过标准方法——对偶上升法(dual ascent)来求解 。
经过推导 , 对偶函数的梯度为:
通过一个小实验 , 可以验证算法的可行性 , 实验设置与结果见图6 。
模块流形这里还有一个重要的问题:当我们将多个层组合起来构建完整的神经网络时 , 会发生什么?
是否需要关注层与层之间的交互 , 并据此修改优化策略?
这需要一种可以将前文介绍的推导逻辑推广到整个神经网络的方法——模块流形(modular manifolds)理论 。
该理论的核心思想是:构建一种抽象机制 , 用来指导如何在各层之间合理分配学习率 。
在本质上 , 在不同层之间分配学习率 , 或者对单个层进行缩放 , 都依赖于我们对网络输出对权重的Lipschitz敏感性的理解 。
我们在搭建网络的过程中会追踪这种敏感性 , 而流形约束有助于我们更加精准地把握它 。
参考资料:
https://thinkingmachines.ai/blog/modular-manifolds/
本文来自微信公众号“新智元” , 作者:新智元 , 编辑:元宇 , 36氪经授权发布 。
推荐阅读











- 刚刚,Meta挖走OpenAI清华校友宋飏,任超级智能实验室研究负责人
- 机器狗腿被锯了也能继续走!最新机器人大脑来自320亿估值独角兽
- AI芯片厂商Groq完成7.5亿美元融资,投后估值69亿美元
- 卖出550万枚智能戒指!可穿戴黑马被曝新融资,冲刺百亿美元估值
- 突破后训练瓶颈?Meta超级智能实验室力作:CaT解决RL监督难题
- 亚马逊开建AGI实验室,一号位也是华人
- AI芯片独角兽一年估值翻番,放话“三年超英伟达”,最新融资53亿超预期
- 390亿美元,全球具身智能第一估值来了,英伟达持续加注中
- 来自MIT最强AI实验室:OpenAI天才华人研究员博士毕业了
- Nothing完成2亿美元C轮融资,估值达13亿美元|最前线