
文章图片

文章图片

文章图片

文章图片
文章图片

文章图片
一双巧手 , 真有这么重要吗?
40° 的夏天 , 窝在空调房的沙发上 , 开一罐可乐 , 再来一部电影简直是人类终极享受 。
但就这么一个稀松平常 , 人人都会的开易拉罐动作 , 对于那些伸出圆手的机器人来说 , 是不可能完成的任务 。
作为发展的必经之路 , 咋让人形机器人长手一直是研发的重点 。 以后的机器人要是没有灵巧手 , 这人类 cosplay 已经 ooc 一半了 。
可问题来了:这么多人 , 花了这么多钱 , 这么多年 , 灵巧手到底是个啥情况呢?
我们查阅了不少资料 , 并采访到了学术圈的专家 , 发现灵巧手看起来小小一个部件 , 里面的门道还真挺多 。
虽然灵巧手和人形机器人看起来是这两年才火起来的 , 但实际上自上个世纪以来 , 相关的研究就没停过 。
来自综述论文《Dexterous hand towards intelligent manufacturing: A review of technologies trends and potential applications》
我们翻到一篇 1986 年的论文 , 发现这四十年前的手竟然和现在的外观看起来没啥两样 。
当时的人们 , 已经在畅想装上双手的机器人 , 能代替自己当牛马了 。
来自 1986 年论文《Design of the Utah/M.I.T Dextrous hand》
但做个雏形容易 , 技术迭代就复杂得多了 。 这之后所有的进化 , 共同的目标都是为了让机械手更灵活、全能、通用 , 更像人手 。
来自中科院自动化所的王博士表示 , 想把灵巧手做好 , 主要得在材料、传感器、驱动三方面下猛料 。
首先 , 材料的改进 , 能让灵巧手变得刚柔并济 。
可以说 , 以前的手都是 “ 钢铁硬汉 ” , 让它们来点微操 , 拿个易碎品就是一场纯纯的赌博 。
为了让手更灵活通用 , 结构材料要追求更轻的重量 , 更高的强度 。 比如钛合金骨架裹上柔软的皮肤 , 上能工厂搬砖 , 下能捏鸡蛋、捡薯片 , 重活细活儿都不在话下 。
而没有触感的手 , 充其量只能叫夹子 。 在一个个丝滑小连招里 , 怎么让手触碰、感受到物体 , 传感器充当着机器人的神经细胞 , 起着至关重要的作用 。
从电阻、电容、电磁到各种各样的柔性电子皮肤 , 神经越多的手越敏感 。 大伙儿都在努力往这个巴掌大的地方里塞东西 , 把传感器卷得更小 , 更集中 。
纳米材料做的电子皮肤
硬件发展的同时 , 软件驱动上 , 灵巧手和它的赛博兄弟们一样 , 也搭上了 AI 的东风 , 各种花活儿训练 , 迅速解锁了一堆技能点 。
比如前阵子我们逛的世界机器人大会 , 就有一些造型纤细 , 动作灵活的手 。 虽然它们大部分还是单独展出 , 但也有装在机械臂上 , 立刻吹拉弹唱样样精通的 。
所以 , 灵巧手的进化之路 , 也不光是它自己的事儿 。
人形机器人发展得飞快 , 要是灵巧手跟不上 , 整体的通用上限可就被牵制了 。
而随着技术路线的选择越来越多 , 市场定价的档位和空间也就大了 。
我们翻了翻购物平台 , 发现大部分机械手集中在几千到几万的价位 , 最便宜的可能只要游戏里两三发 648 , 最贵的能把小米 SU7 带回家 。
比如下面这个上身基础 , 下身 。。。 没有下身的款 , 价格就比较亲民 。
一两千左右的手上一般没啥高新科技 , 也不会配备高精传感器和好看的皮肤 , 供大伙儿跑点简单算法 , 摆个 pose 还是没问题的 。
不过 , 便宜的东西咱一眼就知道它为啥便宜 , 这贵的 , 就各有各的不同了 。 有的贵在材料上 , 有的贵在电机上 。
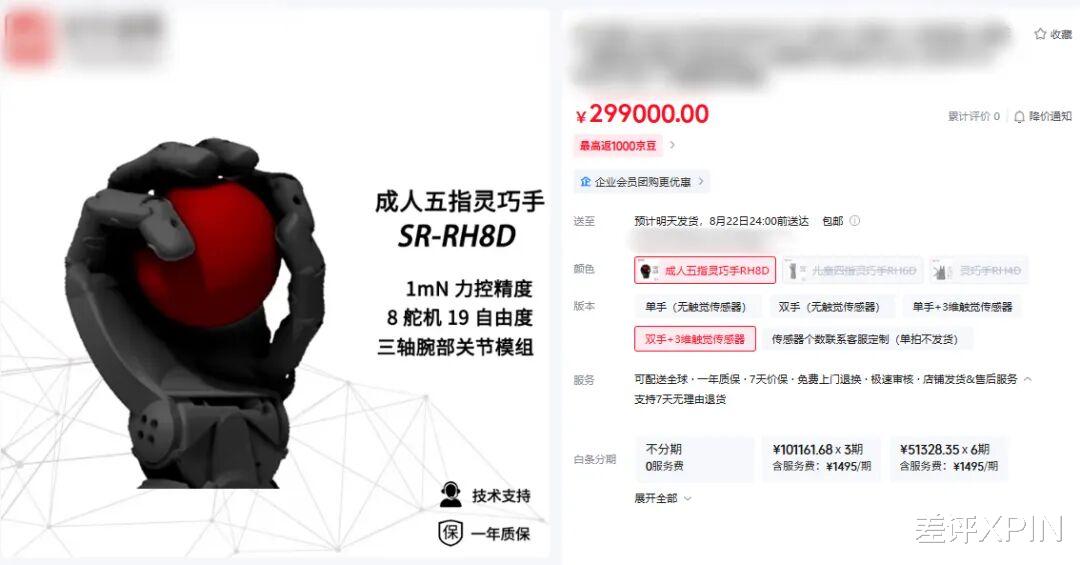
【一只手比整个人还贵,手艺活为啥这么难?】像是下面这款 , 不止手的本体贵 , 传感器更贵 。 据说是进口的高精度触觉传感器 , 一个一万五 , 两只手装十个光传感器就是十五万 。。。
而在和王老师聊天的过程中 , 我们发现在不同需求场景下 , 定价差异确实很大 。 比如在纯科研中 , 一只手七八十万也是很常见的 。
这种金贵的小手技术复杂 , 很难量产 , 用的时候不能磕着了 , 不能累着了 , 不然就要得个烧钱的小毛病 。
但是要说放在服务型机器人上 , 本体可能才三万块 , 装个几十万的手有点夸张了 , 反正能动就行 , 不必太精准 。
高端科研与实际应用之间的巨大鸿沟 , 也正反映了当下灵巧手市场的复杂现状 。
整体来说 , 我们感觉灵巧手的定价还是很难明确的 , 大伙儿原材料来自四面八方 , 不量产成本难降 , 每个手的衡量标准也不一样 , 没法给技术含量锚个价 。
像是有的手参数里会提到传感器精度 , 但到了另一家就不提这个参数;有的手更重视最大负载 , 但有的更注重指尖感知;这款用的是国产自研传感器 , 那款用的是进口电机 。。。
只能说现阶段的各个灵巧手都有它们的优势和缺点 , 哪个更好也要看具体需求 。
或者等人形机器人长大了 , 让孩子自己来挑吧 。。。
最后 , 大伙儿可能都有过和江江一样的疑惑 ——和机器人为啥一定要人形一样 , 灵巧手为啥一定要追求五指?
除了应用场景下 , 五指能干的活儿更多以外 , 王博士还从学术的角度 , 意外给我们打开了新世界的大门 。
现在的机器人训练数据紧缺 , 全靠人体采集 。 而在五根手指的人手引导下 , 三四根机械手指的形态有差异 , 学得就是不如五根的好 。
这个来自学术的答案 , 让这条拟人的研究之路显得非常正确合理 。 尽管当前灵巧手不柔软 , 不稳定 , 甚至不太灵巧 , 我们依然是在向正确的方向前进的 。
或许我们离那双能轻松打开可乐罐的神之一手还有很远 , 但思路已经很清晰 , 剩下的可能就是用技术和时间 , 来填补这段漫长的距离吧 。
推荐阅读
















- 告别模糊与色淡!一文解决打印不清晰的烦恼
- 4.7英寸的小屏手机,蓝狐提前一年开启预热
- 上百倍溢价!花124万买下一台主机:实际可能就值几千块
- 一加豁出去了,从2499元降到1953元,高性价比旗舰售价一降再降
- 子系列新机前瞻!真我、红米冲高,一加史诗级倒退?
- 专利全球第一!这次中国6G技术,又有了突破
- 郭平:华为要成为世界AI算力的第二选择或另一选择!目标比肩美国
- 百度又拿了个第一后,好像找到了自己的节奏
- OPPO Find X9曝光,与哈苏联合更进一步,重量反而变重了?
- 史上第一次!REDMI K90 Pro用上潜望长焦:10月发布