
文章图片

文章图片
文章图片
文章图片
无人机在复杂环境中不怕迷失方向了 , 迅速找到目标!
北航刘偲教授团队提出高低无人机协同导航新范式 , 两台无人机分工配合:高空无人机作为“全景指挥官” , 负责全局感知与推理;低空无人机作为“地面侦察员” , 执行精细导航与目标搜索 , 两者协同快速找到目标 。
话不多说 , 来看实例 。 想让无人机“去湖边指定房子附近找到那辆停在树下的汽车” , 单台无人机要么飞得太高 , 看不到树下的汽车;要么飞得太低 , 顾不上房子、湖泊这些宏观地标 。 单台无人机在复杂环境中容易迷失方向 , 但当高低空无人机协同作战 , 就能快速找到目标:
如下三张图分别从“前视图、高低无人机轨迹、概率预测图”角度 , 展示此方案如何工作:
像找小狗这样的小型目标 , 也能快速配合完成定位:
若目标物标有特定字母、文字描述也可精准匹配:
依据目标人物周边环境的细节特征 , 也能完成精准识别:
为支持该任务 , 团队基于UAV-Need-Help构建了HaL-13k数据集 , 并设计了协作框架AeroDuo 。 他们在Openuav仿真环境对AeroDuo测评 , 验证了其高低协同在环境覆盖、导航精度与自主性之间的有效平衡 。
团队表示 , 本文研究成果将发表于ACM MM 2025 。 以下是更多细节 。
数据集构建考虑到UAV-Need-Help数据集中仅包含单无人机信息 , 研究团队在此基础上补充采集了高空无人机的轨迹与感知数据 , 并优化部分原始轨迹 , 构建出HaL-13k数据集 。 数据集构建示意图如下:
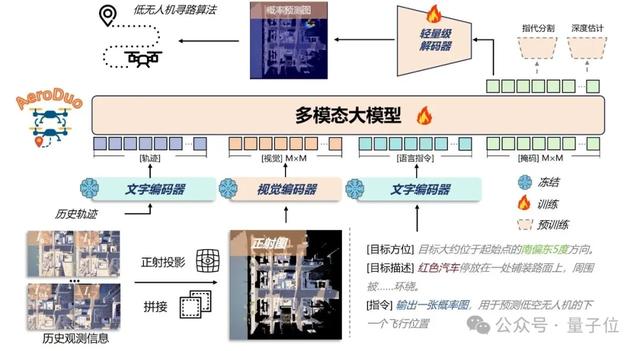
高空无人机规划策略为提升高低无人机系统的感知与决策能力 , 研究团队构建了多模态统一框架Pilot-LLM , 利用大语言模型进行多模态推理 。
其中 , 为了更好地整合高空无人机历史信息 , 研究团队提出全局地图构建模块 , 通过正射投影消除畸变 , 并拼接历史图像生成统一坐标系下的地图 , 提升环境理解与目标定位能力 。
此外 , 为避免精确坐标预测误差 , 采用轻量解码器生成目标概率分布图 , 兼顾探索能力与空间建模效果 。
低空无人机导航搜寻策略低空无人机采用三阶段导航搜索策略:首先 , 根据高空无人机的预测概率图选取高置信度区域的质心作为导航目标并结合A*算法规划关键航点;随后 , 利用基于强化学习的避障策略 , 实现安全灵活的路径执行;最后 , 通过视觉语言模型进行目标检测与定位 。
团队表示 , 未来这套协同模式能轻松扩展到多机协作——在高空无人机预测出目标概率分布图后 , 它可以提取多个潜在目标位置 , 并借助优化算法(如匈牙利算法)将这些任务分配给各个低空无人机 。
同时 , 通过优化动作控制确保安全避障 , 补充真实环境数据训练模型 , 也有助于将高低无人机系统从仿真环境中迁移到现实场景 。
项目主页:https://rey-nard.github.io/AeroDuo_project/
【北航高低无人机协同导航方案:高空掌全局+低空查细节】— 完 —
量子位 QbitAI
关注我们 , 第一时间获知前沿科技动态
推荐阅读












- 首款全景无人机,影翎Antigravity无人机:支持8K全景,8月发布
- 大疆迎来史上最强劲敌!影石进军无人机市场,入门级新品曝光
- 不叫影石叫影翎? Insta360为无人机注册新账号
- 与大疆极限换家?Insta360被曝正在测试2款无人机
- 大疆Agras T100农业无人机发布!100公斤载重,智能农业新标杆!
- 2025国际无人机应用及防控大会:聚焦技术革新与低空经济
- 大疆发布 DJI FC100 旗舰运载无人机,80kg最大载重、9分钟快充
- 这下高低都要给ColorOS点个赞
- 五年磨一剑!大疆Matrice400突破行业级无人机天花板
- 450Wh/kg量产!陀普科技超高性能电池斩获全球头部无人机企业青睐