文章图片

文章图片
文章图片
文章图片
文章图片

文章图片
文章图片

文章图片

不圆 发自 凹非寺
量子位 | 公众号 QbitAI
一条人形机器人发疯的视频在网上火了 , 视频中快递盒子乱飞 , 场面一度十分抓马 。
研究人员:希望是一场幻觉 。
视频中“发疯”的机器人是今年机器人格斗的美国冠军DeREK(原型为宇树机器人G1) , 而抱着头的这位 , 是该机器人团队REKrobot的CEO兼机器人格斗手Cix 。
看看他们在赢得比赛时意气风发的样子 , 估计也想象不到会发生这样的事 。
关于DeREK“发疯”的技术原因 , Cix是这样解释的:我们启用了全身策略 , 但机器人的双脚没有接触地面 。
简单地说 , 被吊起来的人形机器人进入了“行走模式” , 但没有识别到脚下的路 , 才导致了这次失控 。
不过 , 网友们关心的显然是另一方面:为什么要离那么近才能摁停止按钮?它需要一个远程无线的紧急制动!
更详细的解释网友们关心的远程紧急制动其实是存在的——只是不管用而已 。
为什么会不管用?Cix没有说出原因 , 但详细解释了整个过程:
DeREK的最初政策设计上不该出现这种情况 , 文档里也写明悬挂状态下可运行 。
问题在于最终状态自动恢复成了行走模式 。
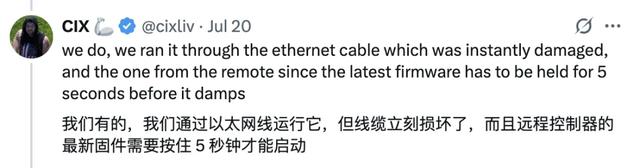
通过网络代码强制终止未果 , 他们配发的无线电急停装置现在需要5秒才能生效 。
最后直到以太网电缆松脱 , 系统才真正停止 。
而5秒 , 对于紧急制动来说 , 可是会要命的 。
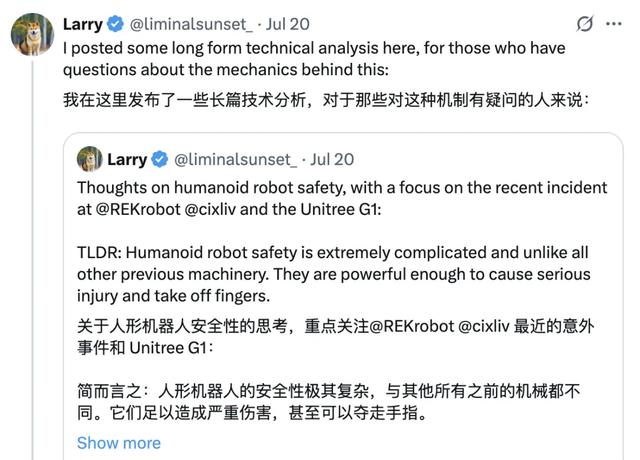
然而 , 虽然Cix自己没找到原因 , 有网友对这件事情作出了深刻的思考 , 回答了以下几个问题:
1、为什么无法关机或移除电池?
电池从机器人身体的侧面安装 , 位于机械臂后面 , 在机器人失去控制时 , 靠近这个区域将极其危险 。
并且 , 电池固定在身体上 , 关闭它需要按住电源按钮两秒钟 , 即使从安全距离用棍子操作也难以实现 。
此外 , 电池本身的BMS按钮可能仅由一款通用微控制器驱动 , 其软件设计仅满足基础功能需求 , 并非用于紧急停止(E-Stop) 。 它很可能缺乏严格的安全设计 , 容易导致以下问题:按钮失灵、物理损坏或软件故障 , 从而在紧急情况下无法切断电池电源 。
2、为什么不能自己对抗机器人?
机器人的电机非常强劲 。 如果有所准备 , 或许能强行停住一个电机 , 但肯定没法同时停住多个 。 每个电机的扭矩高达120至160牛米 , 比全速运转的大功率3类电动自行车还要强 。 而且 , 越靠近电机轴心 , 扭矩越大 。
一旦电机全力运转时 , 肢体被夹在机身和机械臂的关节处 , 可能会造成极其严重的伤害——如果再加上惯性冲击 , 这股力量足以切断手指 , 甚至伤及骨头 。
3、为什么不能通过其他方式切断电源?
由于电机惯性和高制动力 , 在失控操作期间 , 电机可能会将电能反送到总线 。
如果拔掉电源 , 或BMS上的充电保护触发 , 由于电池无法吸收的过电压 , 所有电机和计算机电源可能会永久损坏 。 希望为电池添加硬件切断的用户应该了解这一风险 。
DeREK的紧急制动系统搭载了一台基于Rockchip RK3588 CPU的ARM Linux电脑(未经过可靠性或实时性评估) , 并可选配NVIDIA Jetson模块 。 这些计算机由电池电源通过转换器供电 , 且需要一定时间启动 。 如果计算机系统断电 , 将导致所有控制功能失效(具体行为取决于执行器在通信中断时的预设策略) 。
机器人的核心控制始终由Rockchip处理器和宇树科技(Unitree)的闭源软件掌控 。 在EDU版本中 , 用户可以通过外部计算机或NVIDIA Jetson向Rockchip系统发送自定义指令——该系统应该内置了 RS485 协议转换器 , 用于与电机通信 。
但用户无法获得Rockchip系统的root访问权限或更改其上运行的软件 。
4、为什么不能在计算机上实现紧急制动?
如果发生软件故障 , 在计算机上实现的任何紧急停止程序可能会被无意中忽略 。
从通信方式的角度来讲 , DeREK似乎通过配套遥控器使用Wi-Fi和/或蓝牙进行控制 。 但必须指出 , 这两种通信方式完全不适合用于安全关键控制系统——信号干扰极易导致失控 。
举个简单例子:笔记本电脑的USB 3.0接口都会因干扰而影响2.4GHz无线鼠标的性能 , 更何况是复杂的机器人控制系统?
问题在于 , 急停(E-Stop)、进入阻尼模式以及退出开发者模式等关键操作 , 都需通过无线遥控器来完成 。 令人担忧的是 , 当无线信号中断时 , 系统将如何响应目前尚不明确 。
5、为什么不能编程 , 让它断开控制器时关闭?
若通信中断触发急停 , 机器人很可能会突然关机并随机倾倒 , 考虑到其自重 , 这本身就是安全隐患 。 并且 , 在系统完全停止前 , 很可能存在一段失控时间窗口 , 期间机器人可能出现异常动作 。
如果控制器断开连接 , 操作者将失去对机器人的所有控制 , 包括启用或禁用任何安全功能或错误代码 。
在开发者模式下 , 开发者需对发送给机器人的所有指令承担全责 , 直至Rockchip系统收到退出开发者模式的指令 。 开发者必须自行建立网络通信 , 最关键的是 , 必须制定通信中断时的安全协议 。
虽然不清楚本次事件中DeREK的具体设置 , 但据称该协议不会因通信中断而触发停机 。
6、为什么不能通过软件限制电机可用的力来降低这种风险?
简单地说 , 机器人在正常运作时需要执行器提供全力输出才能保持平衡 。 如果限制峰值力量输出 , 机器人将丧失行走能力 。
想想当你在艰难徒步中过度使用肌肉时的情形:随着肌肉疲劳导致可用峰值力量下降 , 你可能会因失去平衡余量而意外跌倒 。 下次运动时 , 不妨特别留意肌肉的受力状态 。
7、最后的建议
这位网友认为 , 一个良好的安全解决方案应该是多步骤的 。
除去操作环境安全及个人安全方面的建议 , 对机器人自身的安全系统设计 , 大致可分为以下几点:
执行器和电池管理系统应至少符合PL(d) 或ASIL-D等级的安全标准 , 且执行器应具备带外(OOB)硬件安全输入; 商用网络、计算机、线缆等不得用于安全关键系统; 即使是非正式项目 , 也应遵循安全开发流程 , 包括持续测试、故障模式分析和单点故障防护工作; 使用AI制动目前难以认证 , 因此重点应放在监控和紧急切断系统上 。不过 , 该网友也表示 , 以上并非专业工程或安全建议 , 实际应用请咨询认证专家 。
该网友对机器人安全性的看法获得了一致好评:
不是第一次“失控”机器人“发疯”的现象也引起了不少网友的恐慌 , 以及一些科幻的猜想 。
毕竟DeREK是个“格斗机器人” , 很难想象这种事情如果发生在一个更小的空间里 , 会是个多让人棘手的状况 。
毕竟 , 5秒的时间对紧急制动确实有些过长 。
其实这并不是REXrobot第一次出状况 , 在5月份的时候 , 还是Cix , 就有机器人“突然”摔倒的问题 。
有趣的是 , 在那个时候就有人问过机器人紧急制动的事情 , Cix的回答和这次别无二致 。
有网友建议Cix做一次详细的事后分析 , 而不是借着这个视频的东风马上转向融资——好像这件事本身就是为了炒作那样 。
对此 , Cix语意不详地回复:机器人格斗 。
参考链接:[1
https://www.reddit.com/r/robotics/comments/1m4mjmj/a_humanoid_robot_completely_lost_his_mind_derek/[2
https://x.com/cixliv/status/1946648610940367008[3
https://x.com/liminalsunset_/status/1946820928224231764[4
https://x.com/REKrobot
— 完 —
量子位 QbitAI · 头条号
【突然发疯!人形格斗冠军机器人凌空回旋踢,架子都干翻】关注我们 , 第一时间获知前沿科技动态签约
推荐阅读
















- 华为Mate80突然曝光:外观和配置进一步确认,或10月正式发布
- 苹果突然宣布:8 月 9 日起,关闭这家 Apple Store
- 魅族22突然官宣:等窄四等边+白面板,下个月发布
- vivo打响“价格战”,从3399元跌至2379元,国补后突然变香了
- 为什么手机屏幕会突然失灵?可能是这个设置惹的祸
- 宇树科技发布第三款人形机器人Unitree R1:起售价3.99万元
- 红米新机突然入网:1.5K屏+90W快充,八月份发布
- 华为突然上架新机,麒麟芯片+512GB+5600mAh+卫星通信,售价感人
- 英伟达突然宣布,恢复销售H20芯片,中方回应耐人寻味!
- 华为新机突然开启预售:麒麟9010S+鸿蒙5.1,旗舰体验4199元起