文章图片
亿佰特具有完整的Modbus与CAN系列的设备体系 , 但是对于选型的用户来说 , 如何确定自己在工业现场或其他需求的情况下选择适合自己的通信协议设备 , 却是一个难题 , 本文 , 针对亿佰特系列设备选型的基础上 , 进行CAN与Modbus两种通信协议的区分 , 旨在进一步让客户选择适合自己所需应用场景的产品 。
首先 , 我们先简单的了解一下 , CAN与Modbus两种通信协议 。
一、定义与概述CAN总线是一种由Bosch公司在1980年代提出的总线型通信协议 , 其核心是基于物理层和数据链路层的设计 。 CAN本身并不包含应用层定义 , 但可以通过如CANopen、DeviceNet、J1939等上层协议进行扩展 。 其设计初衷是用于实时性要求高的嵌入式系统 , 如汽车电子等 。
【CAN与Modbus的主要区别「帧结构、拓扑、访问机制、应用」】Modbus协议则是一种由Modicon公司提出的应用层通信协议 。 它可以运行在不同的物理层之上 , 包括串口通信(Modbus RTU/ASCII)和以太网(Modbus TCP) 。 Modbus协议以其简单性、开放性和通用性广泛应用于PLC、变频器、仪表和SCADA系统之间的通信 。
总之 , CAN是低层通信协议 , Modbus是高层应用协议 。
二、物理层与拓扑2.1传输介质与布线
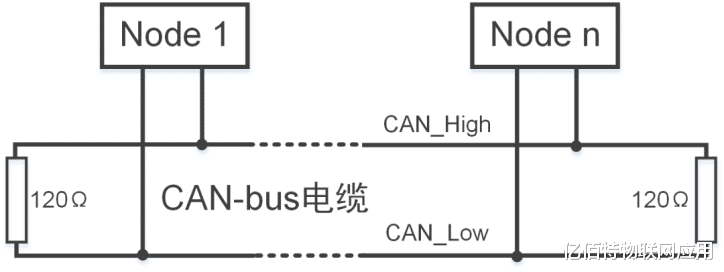
CAN:使用差分双绞线(CAN_H/CAN_L) , 总线两端需120?Ω终端电阻 。
Modbus RTU:通常也是差分双绞线(RS485) , 在较低速率下可覆盖约1200?m , 亦需终端电阻 。
Modbus TCP:走标准以太网(Cat5/Cat6) , 可复用现有网络基础设施 。
2.2节点数量与网络拓扑
CAN:可支持约110个节点(取决于收发器负载) , 所有节点平级“对等”接入 。
Modbus RTU:RS?485每条总线最多32个设备(取决于负载) , 采用主?从架构 。
Modbus TCP:节点数量仅受以太网交换机端口数及网络规模限制 。
三、数据链路层与访问机制3.1总线访问控制
CAN:在比特层实现CSMA/CR(载波监听多路访问加碰撞解决) , 通过标识符ID仲裁 , ID值越低优先级越高 , 实现确定性访问 。
Modbus:由主站发起所有通信 , 轮询各从站并依次收发 , 通信时延受轮询间隔与设备数量影响 。
3.2错误检测与处理
CAN:硬件级CRC校验、比特填充检查、应答槽与自动重传 , 保证帧完整性与可靠性 。
Modbus:RTU模式使用CRC?16 , ASCII模式使用LRC , 错误超时与重试逻辑需由应用软件/固件自行实现 。
四、帧结构与载荷4.1 CAN帧
标识符与优先级:标准帧11位或扩展帧29位ID , 用于升序仲裁 。
载荷:Classical CAN最多8?字节;CAN?FD最多64?字节 。
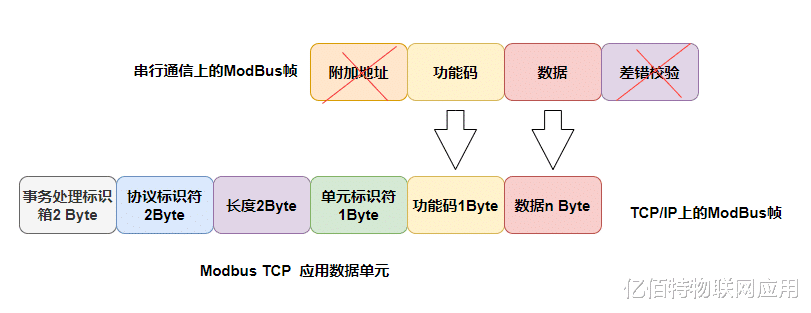
4.2 Modbus帧
地址与功能码:1?字节设备地址+1?字节功能码+数据+2?字节CRC(RTU) 。
载荷长度:RTU模式下最多252?字节;TCP模式下受以太网包长限制 , 可视为“无限制” 。
五、速率与距离权衡CAN:最高1?Mbps(≤40?m);距离越长需降速(如500?m时125?kbps) 。
Modbus RTU:常见9600–115200?bps;≤100?kbps时可达约1200?m 。
Modbus TCP:可支持100?Mbps或1?Gbps , 受以太网硬件限制 。
六、典型应用CAN:汽车内部网络、多轴机器人、医疗设备等要求确定性控制场景 。
Modbus:PLC与I/O通讯、SCADA遥测、能源管理与楼宇自动化等场景 。
亿佰特具有完整的Modbus与CAN系列的设备体系:
CAN系列设备可参考:ECAN系列设备产品 , 如ECAN-E01 , ECAN-W01 , ECAN-S01等等 。
Modbus系列设备可参考:远程IO系列设备 , 如分布式IO模块系列产品 , MA01串口IO模块系列产品 , 温度采集模块ME31系列产品 。
推荐阅读













- 构建安全防线:卡巴斯基网络免疫与AI安全双轮驱动
- 本末科技完成数亿元B轮及B+轮融资,加速机器人与直驱技术产业化落地
- 质感与色彩的双重暴击!vivo S30 Pro mini颜控别错过
- 半导体晶圆厂与数据中心,都很缺人
- 6.67英寸屏幕+三丽鸥萌趣:vivo S30外观的视觉与触感体验
- 智能家电重塑家庭情感与互动新纽带,让家人解脱束缚
- DPU与GPU ,边缘AI怎么选?
- 英特尔Nova Lake将采用混合图形引擎:渲染与解码并非同一家
- 三星将与汽车芯片制造商共同开发下一代车载半导体技术
- 超级干货!开机电路原理与功能详解